 赞
赞 加州大学伯克利分校的工程师已经找到了一种在不增加能源成本的情况下,提高现代四轴飞行器速度的方法。现代无人机在过渡到水平飞行模式时会稍微向前倾斜。这导致正面投影的增加,这自动意味着飞行过程中的阻力增加。加州大学伯克利分校的工程师们提出了这种机制的有效替代品。
他们开发了一种称为QUad的无人机设计,带有未启动转子倾斜机构(QUaRTM)。它由一个矩形主体和四个横梁组成,横梁通过铰链和弹簧连接到主体上。
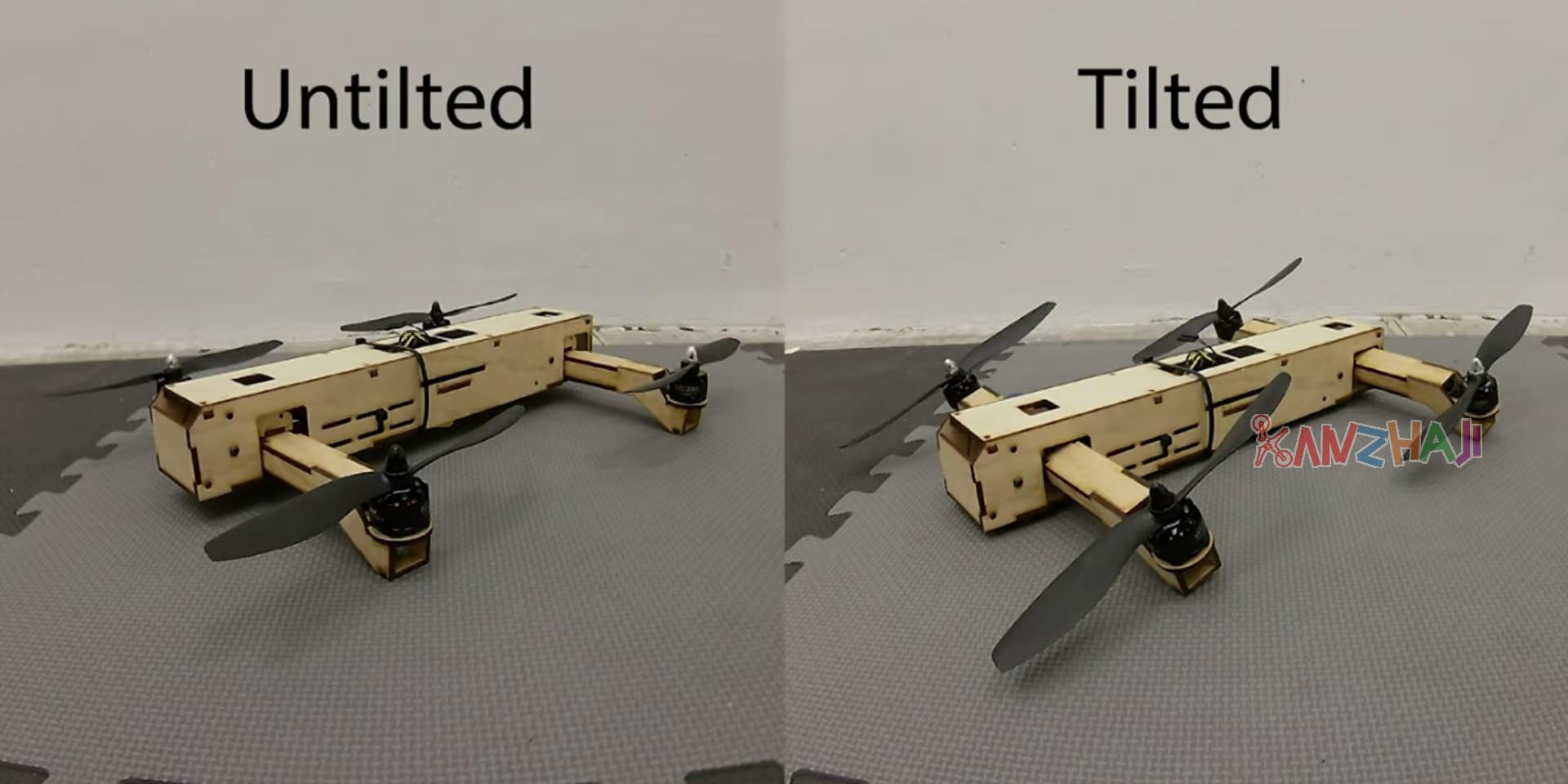
使用后者,转子可以与无人机的机身保持一致。然而,随着推力的增加,弹簧缺乏将它们固定到位的力,之后无人机电机向前倾斜20度。由于采用了新机制,无人机可以切换到水平飞行模式,而不会向前倾斜,从而增加阻力。科学家在两种模式下测试了 QUaRTM。
当倾斜机构解锁时,最大和巡航速度分别增加12.5%和7.5%。同时,QUaRTM在飞行过程中以15-20 m/s的速度开始消耗20%的功率。
视频:
本地
来源:newatlas.com