赞
赞 消费级无人机拜卫星导航技术的民用成熟,以及小型三轴陀螺芯片的批量化生产,在2011年前后迎来了数款多旋翼无人机飞行控制器的上市。为日后RTF(到手飞)机型的诞生,打下了坚实的技术基础。仅两三年时间的发展,无人机的消费者从经验丰富的航模玩家和相关从业人员,转变为千家万户每一位普通人,消费级无人机成为旅行携带相机之外的另一种选择。
在那个多旋翼飞行控制器三分天下的年代,极飞、大疆创新、零度智控牢牢把握着多旋翼无人机市场的飞控核心。

(极飞 XAircraft FC1212-S,2011年发布)

(大疆创新 DJI WooKong-M,2012年发布)


(零度智控 YS-X6,2012年发布,可以说是最大的飞控了….)
当年仅购买飞行控制器都高达三千~七千元,还不含机架和任何动力系统,再加上一万起步的三轴稳定云台,组装起航拍整机的费用可以说令人咂舌。 

(八年前笔者组装的六轴,购买组件成本就得2万起步)
1、三轴陀螺加速计
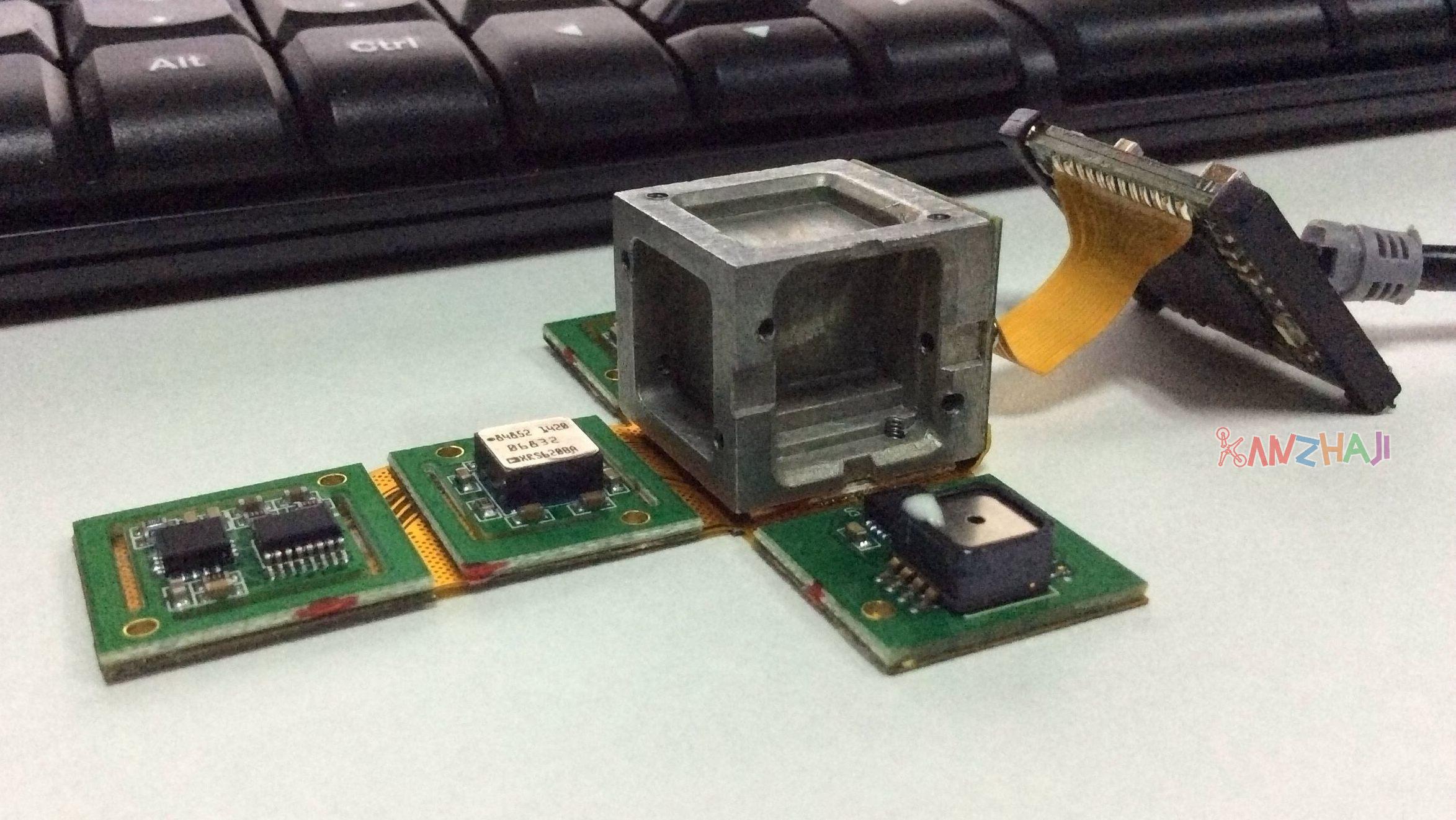
处于核心领导地位且至今无法撼动,首先要为大家介绍的大佬,无人机最最核心的三轴陀螺加速计。但在早期因为飞控软件不够完善,指南针一旦干扰,经常连三轴陀螺加速计这个老大都不放在眼里,直接干扰姿态(其实是多器件数据融合的算法跑崩了)。说了这么多,长什么样子呢?下面拆开看下DJI的WooKong-M IMU吧~~
当然市面上消费级无人机的部件比这个小多了,比如精灵3无人机的IMU。
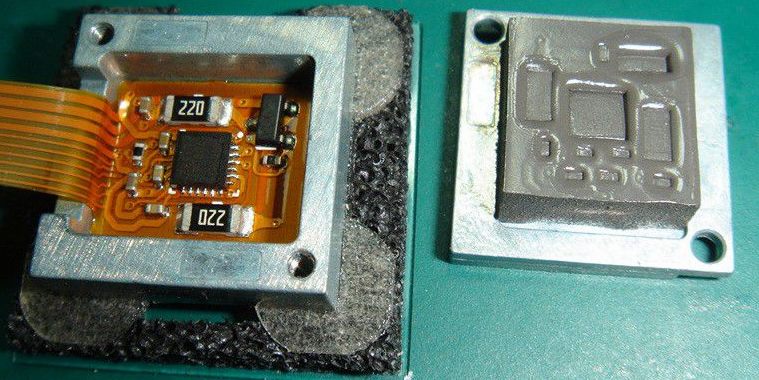
没有它的加持无人机什么也不是。  最基本的无人机飞行控制器可以没有指南针、没有气压计、甚至没有卫星模块,但是三轴陀螺加速计的地位无可替代,它是一切姿态控制运转的初始条件,牢牢占据ROOT权重。
最基本的无人机飞行控制器可以没有指南针、没有气压计、甚至没有卫星模块,但是三轴陀螺加速计的地位无可替代,它是一切姿态控制运转的初始条件,牢牢占据ROOT权重。
2、气压计
而排名第二的就是定高专业户,气压计啦。虽然低空定高的效果真心是上上下下的不太好用,但是只要达到2米以上,气压计工作还是很靠谱的。但!就因为它低空不稳~ 于是江湖地位受到了超声波、红外设备的挑战。市面上主流机型的低空定高都很少再直接采用它的数据,而是超声波、红外唱主角戏,只有超过一定高度(5~10米)以后,超声波、红外基本失去工作范围,才能恢复它的权重。通过切换器件权重,换来了低空更精确的定高效果。

同时气压计也是仅次于三轴陀螺加速计和核心部件,一旦它出现问题,电机只要解锁~~~ 你的无人机就会前往西方极乐世界。
3、卫星模块
接下来出场的是老三,卫星定位模块。有它的存在,无人机才能知道我在哪儿,要去哪儿。定点悬停,自动返航基本都是它的功劳。它其实最少会出现问题,人家毕竟只是个傻白甜~ 天空有什么卫星信号我就照单操收下来,卫星信号不佳也不是我的事儿,是你放飞的位置没选对。
高楼附近返航点记录偏差怪我嘛?山谷之间起飞漂移怪我嘛??电信设备发射塔附近不定位能怪我嘛???室内根本没信号只能姿态模式炸机了能怪我嘛???不能啊!卫星模块在室内飞行无法定位是硬伤,所以下视觉定位模块出现了~只要没有卫星的场合,老三就只能退居二线,视觉定位担当起老三的工作。
4、指南针
把指南针放在第四位是笔者有意而为之~~ 只有它能决定无人机飞向何方,且在消费级无人机早期,指南针在飞控代码的权重之高,甚至盖过了三轴陀螺加速计,而它肇事引起的事故可以说占据了半壁江山,大量无人机丧命于此。抽风概率之高,以至于不得不定期跟它拜个天地。无人机新手可以去翻翻当年KANZHAJI在自组机和精灵2的炸机案例。
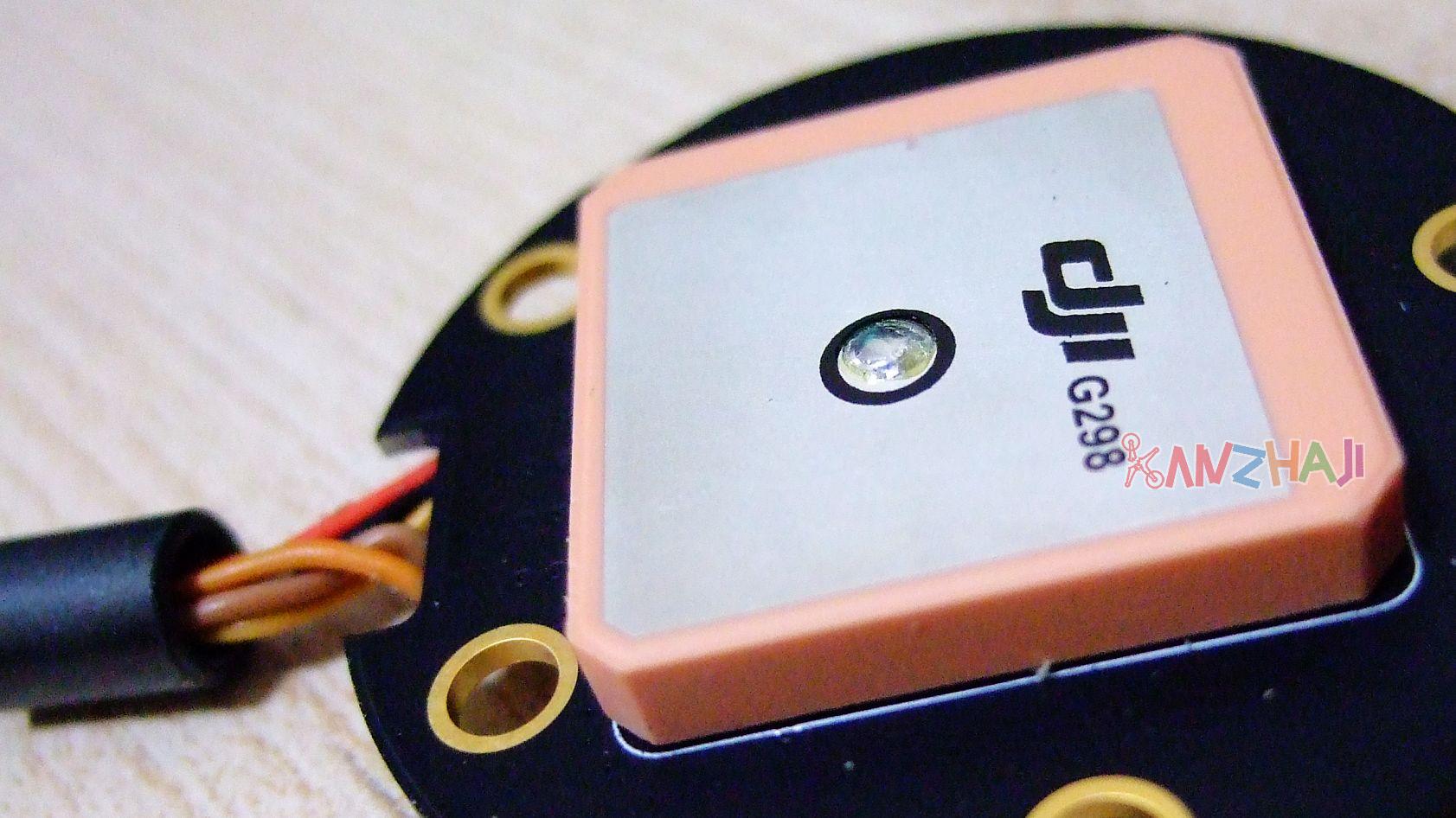
(DJI 精灵3放置在脚架上指南针模块)
而几乎所有独立飞控都是把指南针跟卫星模块塞到一起,毕竟为了收讯良好,要把卫星模块举高高~~ 同时也远离了其他电子设备的干扰。

但在早期,指南针干扰,飞机直接翻车,禁止起飞,或者万年进姿态,不管卫星信号是否达标,只要有老四扯着后退,都让你动弹不得。飞控软件对指南针容错能力极差~~ 早期的精灵系列和NAZA系列固件,指南针犹如掌握生杀权利的大神,你的无人机会不会出事儿,几乎全取决于指南针相关飞控代码是否抽风。不过嘛~~还好有背锅侠来默默承受这一切,那就是:
干扰!
只要莫名其妙的无人机翻车、返航方向错误,通通推给干扰就好了。
于是“干扰”都愣住了 ,还能这么玩的嘛??
,还能这么玩的嘛??
这里面比较有代表的事故,就是笔者当年组装的六轴,朝着返航点完全相反的位置俯冲,最终撞树自挂东南枝~ 然后就诞生了无人机界的泥石流网站……
为避免无人机不再被指南针抽风干扰,有大量机型直接在固件上禁止了指南针干扰环境下起飞,于是又带来了副作用。
另据不负责任的江湖传闻,DJI的汪大老板就在某次室内试飞无人机,因指南针干扰而无法起飞,极其不爽:泥个鳖孙~(请自觉调用小岳岳的河南口音朗读)…

最终攻城狮修改了固件,降低了指南针这部分的权重。因此部分机型才能在指南针显示计模值异常的情况下,正常起飞和返航,比如御2系列。通过多年完善,现因为指南针异常而无人机翻车的事故,已非常罕见。
5、超声波、红外
超声波和红外组件因为仅在低空使用,作为气压计的补充,放到后面来讲大家应该没啥异议。一般场景下,这两种性质的器件也几乎不会出问题,尤其超声波万年稳如狗。

(DJI 精灵3下视觉定位模块包含了超声波定高)
唯有红外传感器偶尔在云雾中,因红外会被云雾反射,造成传感器误判越苞代疽,超越了老二气压计的权重,同时还不care油门控制。

(DJI Mavic 2下视觉定位模块包含了红外定高)
明明在高空而无人机认为快到地面,收完油门也只有极低的下降率。只能想办法辗转腾挪,飞离云雾区域才能正常下降。相关案例在KANZHAJI输入“降不下来”搜索,有惊喜~~ 

6、视觉定位
视觉定位原本的设计初衷,纯粹是为了补室内飞行卫星无法定位的缺~~通过双目或单目技术,实现纹理的对比,从此消费级无人机就可以愉快的在室内精确定点。而当下视觉进化到双目之后,定点精度甚至高于卫星定位,因此在低空悬停时,不管卫星信号时候达标,只要环境光允许,下视觉定位都会介入增稳。
从DJI Mavic PRO开始,如果打开了降落障碍判断,下视觉定位权限会高于用户打杆,只要视觉定位认为地面图像不符合内置规则,收油门飞机不降落反而会加速上升。
随着厂家算法和芯片处理性能的提升,视觉定位的权重近年来有不断上升的趋势,尤其是视觉惯性里程计(VIO) 的应用,VIO的全称是Visual-Inertial Odometry。假以时日,卫星模块的权重也将受到威胁~ 已实现无卫星VIO返航的道通智能 EVO II表示,我也很为难啊~~ 

但这也是没办法的事儿,谁让卫星模块那个傻白甜除了照单抄收啥也不会,有个干扰源就抓瞎了。 
总结:
三轴陀螺加速计是大佬~雷打不动的地位;老二气压计在低空干活不利索,所以超声波、红外低空暂时当老二,达到一定高度气压计才能回归老二的正位,红外偶尔会在云雾环境夺老二的权;卫星模块老三这个傻白甜基本不会犯错,只是在室内得让位给老六视觉定位;老四指南针从出生一直很疯癫,动不动拉着全家一起跳楼,治了四五年才有好转;老五超声波、红外只低空当当老二的临时工,大部分时间都是歇着;视觉定位这老六近些年上健身房太勤快,虎视眈眈要从傻白甜的老三饭碗里抢业务~ 
最后,通过笔者的抛砖引玉,相信让大家对无人机各器件权重有了初步认识。而无人机器件在飞行控制器的权重也并非一成不变,而是随着技术的进步不断调整。搞懂飞行控制器,放飞无人机时方可心有定境,游刃有余。

那么问题又来了,DJI FPV到底哪天发布?